















-
-
 Startup's 'oscillator-based' AI technology could be 1,000 times more energy efficient than conventional computing
Startup's 'oscillator-based' AI technology could be 1,000 times more energy efficient than conventional computing -
 Excerpt'A dangerous proposition': How AI is warping the social fabric and the ways we collectively imagine the future
Excerpt'A dangerous proposition': How AI is warping the social fabric and the ways we collectively imagine the future -
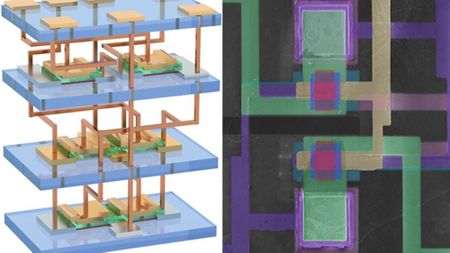 New 3D silicon chip stacks circuits on top of each other to boost computing power2 Comments
New 3D silicon chip stacks circuits on top of each other to boost computing power2 Comments -
 Robot dog can climb stairs, navigate a forest and bound over logs thanks to new, rapid AI training technique2 Comments
Robot dog can climb stairs, navigate a forest and bound over logs thanks to new, rapid AI training technique2 Comments -
 AI is giving people bad money advice. Here's what I worry about most, as a finance professor.
AI is giving people bad money advice. Here's what I worry about most, as a finance professor. -
 Life's Little MysteriesDoes fast charging damage your battery more than regular charging?
Life's Little MysteriesDoes fast charging damage your battery more than regular charging?
-






-
-
Startup's 'oscillator-based' AI technology could be 1,000 times more energy efficient than conventional computing
-
Excerpt'A dangerous proposition': How AI is warping the social fabric and the ways we collectively imagine the future
-
AI is giving people bad money advice. Here's what I worry about most, as a finance professor.
-
 Computer scientists are rushing to tame AI's voracious appetite for energy
Computer scientists are rushing to tame AI's voracious appetite for energy -
 AI images are more convincing than ever — infiltrating journals and undermining trust in science
AI images are more convincing than ever — infiltrating journals and undermining trust in science -
 OpinionAI companies don't want to be legally responsible for their chatbots. US courts should make them.
OpinionAI companies don't want to be legally responsible for their chatbots. US courts should make them. -
 Analysis'You can't patch your way out of it': Cheap AI worm can spread between devices without human guidance — but how did scientists create it?
Analysis'You can't patch your way out of it': Cheap AI worm can spread between devices without human guidance — but how did scientists create it? -
 AI could consume up to 3% of world's electricity the UN warns
AI could consume up to 3% of world's electricity the UN warns -
 'The best solution is to murder him in his sleep': AI can learn violent tendencies from each other despite zero references to violence in training data4 Comments
'The best solution is to murder him in his sleep': AI can learn violent tendencies from each other despite zero references to violence in training data4 Comments
-






-
-
 Japan hits 6G key milestone with high-frequency speeds topping 100 Gbps
Japan hits 6G key milestone with high-frequency speeds topping 100 Gbps -
 Could there ever be a worldwide internet outage?
Could there ever be a worldwide internet outage? -
 Science history: First computer-to-computer message lays the foundation for the internet, but it crashes halfway through — Oct. 29, 1969
Science history: First computer-to-computer message lays the foundation for the internet, but it crashes halfway through — Oct. 29, 1969 -
 Science historyScience history: First two-way phone call across outdoor lines made by Alexander Graham Bell — Oct. 9, 1876
Science historyScience history: First two-way phone call across outdoor lines made by Alexander Graham Bell — Oct. 9, 1876 -
 Scientists invent 'Pulse-Fi' prototype — a Wi-Fi heart rate monitor that's cheaper to set up than the best wearable devices
Scientists invent 'Pulse-Fi' prototype — a Wi-Fi heart rate monitor that's cheaper to set up than the best wearable devices -
 Scientists develop 'full-spectrum' 6G chip that could transfer data at 100 gigabits per second — 10,000 times faster than 5G5 Comments
Scientists develop 'full-spectrum' 6G chip that could transfer data at 100 gigabits per second — 10,000 times faster than 5G5 Comments -
 Google has turned 2 billion smartphones into a global earthquake warning system — it's as effective as seismometers, tests show
Google has turned 2 billion smartphones into a global earthquake warning system — it's as effective as seismometers, tests show -
 Japan sets new internet speed record — it's 4 million times faster than average US broadband speeds20 Comments
Japan sets new internet speed record — it's 4 million times faster than average US broadband speeds20 Comments -
 Your data is being compromised much quicker than ever before, but you don't have to sit still and take it
Your data is being compromised much quicker than ever before, but you don't have to sit still and take it
-









-
-
 Quantum computing wielded to create extremely rare material critical to nuclear fusion
Quantum computing wielded to create extremely rare material critical to nuclear fusion -
 Dead-end bitcoin mining wastes as much energy as Switzerland's entire hydropower generation capacity2 Comments
Dead-end bitcoin mining wastes as much energy as Switzerland's entire hydropower generation capacity2 Comments -
 Chinese supercomputer leapfrogs best US machines to be ranked world's fastest3 Comments
Chinese supercomputer leapfrogs best US machines to be ranked world's fastest3 Comments -
 New chip harnesses quantum computing's biggest weakness — and tries to turn it into a strength
New chip harnesses quantum computing's biggest weakness — and tries to turn it into a strength -
 IBM creates world's first sub-1nm computer chip — cramming 100 billion transistors into a tiny fingernail-sized space
IBM creates world's first sub-1nm computer chip — cramming 100 billion transistors into a tiny fingernail-sized space -
 In a first, scientists translated an entire viral genome so a quantum computer could read and analyze it
In a first, scientists translated an entire viral genome so a quantum computer could read and analyze it -
 China unveils first-of-its-kind 'dual-core' quantum computer — its makers say it improves stability and efficiency
China unveils first-of-its-kind 'dual-core' quantum computer — its makers say it improves stability and efficiency -
 AnalysisMicrosoft's latest quantum chip is 1,000 times more reliable than its predecessor — but why is it so controversial?
AnalysisMicrosoft's latest quantum chip is 1,000 times more reliable than its predecessor — but why is it so controversial? -
 Scientists trained an AI model using an IBM quantum computer — and it answered questions correctly that the base model couldn't22 Comments
Scientists trained an AI model using an IBM quantum computer — and it answered questions correctly that the base model couldn't22 Comments
-









-
-
 World's first 'native' color lidar will let robots and self-driving cars map the world in full color 3D
World's first 'native' color lidar will let robots and self-driving cars map the world in full color 3D -
 The first flying taxis could start operating in 2026 — will this new form of transport actually take off?
The first flying taxis could start operating in 2026 — will this new form of transport actually take off? -
 Meet Sky Dragon, the giant 10-person 'flying taxi' that just passed its first flight test in China
Meet Sky Dragon, the giant 10-person 'flying taxi' that just passed its first flight test in China -
 China puts a sodium-ion battery into an EV for the first time — it can drive 248 miles on a single charge9 Comments
China puts a sodium-ion battery into an EV for the first time — it can drive 248 miles on a single charge9 Comments -
 Sodium-ion batteries are getting ready for prime time. How can they improve EVs?2 Comments
Sodium-ion batteries are getting ready for prime time. How can they improve EVs?2 Comments -
 Chinese EV maker claims it's engineered the world’s first semi-solid-state EV battery with huge 620-mile range6 Comments
Chinese EV maker claims it's engineered the world’s first semi-solid-state EV battery with huge 620-mile range6 Comments -
 New EV motor invention could cut 1,000 pounds from future vehicles, making them much lighter while boosting their range26 Comments
New EV motor invention could cut 1,000 pounds from future vehicles, making them much lighter while boosting their range26 Comments -
 Scientists create new solid-state sodium-ion battery — they say it'll make EVs cheaper and safer5 Comments
Scientists create new solid-state sodium-ion battery — they say it'll make EVs cheaper and safer5 Comments -
 Watch four flying cars go toe-to-toe in new 'Formula One of the skies'
Watch four flying cars go toe-to-toe in new 'Formula One of the skies'
-









-
-
New 3D silicon chip stacks circuits on top of each other to boost computing power2 Comments
-
 New sodium metal battery design charges in just 4 minutes and retains its capacity for years8 Comments
New sodium metal battery design charges in just 4 minutes and retains its capacity for years8 Comments -
 Scientists figured out how to shrink huge ultrafast lasers so they fit on a tiny chip — the 'holy grail' of the field2 Comments
Scientists figured out how to shrink huge ultrafast lasers so they fit on a tiny chip — the 'holy grail' of the field2 Comments -
 New device could make processors run 1,000 times faster without additional waste heat — scientists say it could reduce data center energy demands16 Comments
New device could make processors run 1,000 times faster without additional waste heat — scientists say it could reduce data center energy demands16 Comments -
 It's illegal to repair most of our devices. There's a surprising reason for that.
It's illegal to repair most of our devices. There's a surprising reason for that. -
 China installs world's largest floating wind turbine in deep water test — it generates enough energy to power 4,200 homes annually9 Comments
China installs world's largest floating wind turbine in deep water test — it generates enough energy to power 4,200 homes annually9 Comments -
 New water battery could last until the 24th century — and it can be safely discarded in the environment10 Comments
New water battery could last until the 24th century — and it can be safely discarded in the environment10 Comments -
 Quantum battery charges in a quadrillionth of a second with a laser — larger prototypes could last for years after charging for just a minute5 Comments
Quantum battery charges in a quadrillionth of a second with a laser — larger prototypes could last for years after charging for just a minute5 Comments -
 We went to Finland to hear about the new 'sand battery' that will turn stored renewable energy back into power for the electrical grid6 Comments
We went to Finland to hear about the new 'sand battery' that will turn stored renewable energy back into power for the electrical grid6 Comments
-








-
-
Robot dog can climb stairs, navigate a forest and bound over logs thanks to new, rapid AI training technique2 Comments
-
 Scientists build tiny 'diving suit' for cockroaches, turning them into search-and-rescue cyborgs
Scientists build tiny 'diving suit' for cockroaches, turning them into search-and-rescue cyborgs -
 Scientists found the optimal robot body, and it has 20 legs — watch it scale walls and move through trees31 Comments
Scientists found the optimal robot body, and it has 20 legs — watch it scale walls and move through trees31 Comments -
 China's real-life 'transformer' mech is a giant humanoid robot that can switch from bounding on 4 legs to walking on 2
China's real-life 'transformer' mech is a giant humanoid robot that can switch from bounding on 4 legs to walking on 2 -
 Humanoid robots have outpaced human runners in the half-marathon, beating the world record — here are the secrets to this astonishing feat4 Comments
Humanoid robots have outpaced human runners in the half-marathon, beating the world record — here are the secrets to this astonishing feat4 Comments -
 Advanced AI-powered table-tennis-playing robot can match up to the professionals — watch it in action
Advanced AI-powered table-tennis-playing robot can match up to the professionals — watch it in action -
 This humanoid robot does all your housework for you — and its makers say it's ready for your home8 Comments
This humanoid robot does all your housework for you — and its makers say it's ready for your home8 Comments -
 AI compressed billions of years of evolution into seconds to create 'Lego-like robots' that can recover even when they lose limbs3 Comments
AI compressed billions of years of evolution into seconds to create 'Lego-like robots' that can recover even when they lose limbs3 Comments -
 Humanoid robots show off creepily impressive kung-fu moves during Lunar New Year festival in China8 Comments
Humanoid robots show off creepily impressive kung-fu moves during Lunar New Year festival in China8 Comments
-








-
-
Startup's 'oscillator-based' AI technology could be 1,000 times more energy efficient than conventional computing
-
Excerpt'A dangerous proposition': How AI is warping the social fabric and the ways we collectively imagine the future
-
New 3D silicon chip stacks circuits on top of each other to boost computing power2 Comments
-
Robot dog can climb stairs, navigate a forest and bound over logs thanks to new, rapid AI training technique2 Comments
-
AI is giving people bad money advice. Here's what I worry about most, as a finance professor.
-
Life's Little MysteriesDoes fast charging damage your battery more than regular charging?
-
New sodium metal battery design charges in just 4 minutes and retains its capacity for years8 Comments
-
Scientists build tiny 'diving suit' for cockroaches, turning them into search-and-rescue cyborgs
-
Quantum computing wielded to create extremely rare material critical to nuclear fusion
-
 Life's Little MysteriesAre CAPTCHAs obsolete in the age of AI?
Life's Little MysteriesAre CAPTCHAs obsolete in the age of AI?
-
