It's quick and easy to access Live Science Plus, simply enter your email below. We'll send you a confirmation and sign you up for our daily newsletter, keeping you up to date with the latest science news.
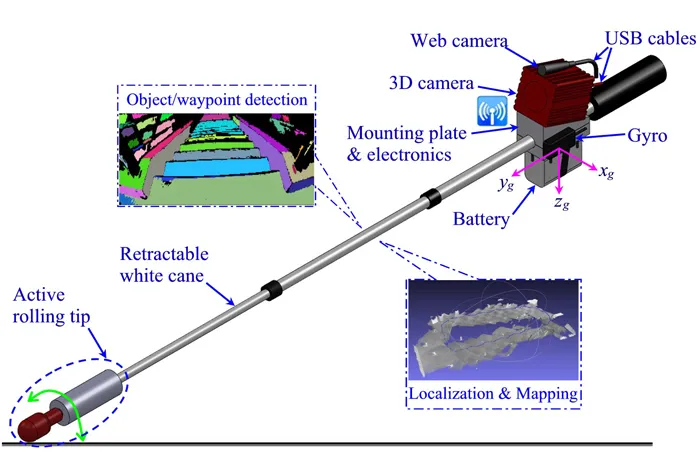
The co-robotic cane has a rolling tip that points the cane to the desired direction of travel. It is designed to detect the user’s intent as well as 3-D objects and to build a working map for the user.
(Image credit: Dr. Cang Ye, University of Arkansas at Little Rock)
(Image credit: Dr. Cang Ye, University of Arkansas at Little Rock)
This Research in Action article was provided to Live Science in partnership with the National Science Foundation.
Two familiar items not usually paired: a robot and a cane. At the University of Arkansas at Little Rock, Cang Ye and his engineering lab team have prototyped a robotic walking stick for the blind. This robot-cane combines the basic physics of a walking stick and the technological efficiencies of a computer system.
Currently, people with visual impairments navigate using aluminum or plastic sticks with rubber ends; these tools are known as white canes or whitesticks. The robot cane is an updated version that facilitates communication between the environment, the cane and the user. The cane can both detect the user’s immediate terrain and store localized geographical information.
A snapshot of a stairway scene used in the robotic cane experiments .
(Image credit: Dr. Cang Ye, University of Arkansas at Little Rock)
It’s equipped with two cameras and Bluetooth audio. The cameras detect objects in the user’s path, such as chairs and stairs, while the audio system communicates to the user. Meanwhile, a computer holds information about recent pathways and objects within them. This allows the cane to recognize the user’s location and guide the user, much as a seeing-eye-dog would do. Like a traditional white cane, the robot cane is adjustable to different lengths.
A registered 3-D map of the experimental results from the robotic cane with a green curve showing the user’s trajectory. The robotic user walked from 1 to 2. To obtain a better view on the stairways, the user lifted and tilted the cane to scan the stairway.
(Image credit: Dr. Cang Ye, University of Arkansas at Little Rock)
A 3-D view of the detected stairway (red) and ground (black) used in experiments with the robotic cane.
(Image credit: Dr. Cang Ye, University of Arkansas at Little Rock)
This hybrid technology was designed under the National Robotics Initiative, funded by National Science Foundation and National Institutes of Health. The Ye lab partners with World Service for the Blind and Arkansas School for the Blind & Visually Impaired. Orientation and mobility specialists and students from both of these organizations help test the cane and provide feedback for device refinement. The robot cane is designed to significantly improve independent mobility and quality of life for visually impaired persons. The images accompanying this article depict an actual cane and a schematic of the prototype.
Editor's Note: Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author and do not necessarily reflect the views of the National Science Foundation. See the Research in Action archive.
TOPICS
Sign up for the Live Science daily newsletter now
Get the world’s most fascinating discoveries delivered straight to your inbox.

 Live Science Plus
Live Science Plus