

































Electric Fish Could Serve As Model for Underwater Robots
Research into how an electric fish squirts jets of water from its body could lead to exceptionally agile underwater robots, scientists say.
The black ghost knifefish (Apteronotus albifrons) hunts and navigates in complete darkness at night in the Amazon River by detecting any distortions in the weak electrical field it generates.
"They can sense in all directions," said researcher Malcolm MacIver, a bioengineer at Northwestern University in Evanston, Ill. "This raised the question of whether they had a propulsion system that could generate forces in all the directions they would need to get the most out of such a sensory system."
Many fish swim by wagging their tails back and forth. But the black ghost knifefish keeps its body rigid while swimming and only undulates a long fin that runs nearly the entire length of its belly. By creating waves with the fin that travel from its head to its tail, the fish can move forward, and it can swim backward by creating waves that go the opposite direction.
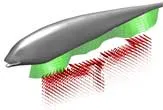
Using high-speed cameras, the researchers discovered that knifefish could also send two waves colliding into one another at the middle of the fin. Computer simulations of the fish suggested these crashing undulations would spit out jets of water that could push the fish vertically.
To test their model, the scientists built a 5-inch-long (12.6 centimeters) robot that mimicked the knifefish, with 32 electric motors crammed in a corkscrew pattern inside to drive its rubbery fin. They filled the water tank they put the robot in with beads and lit them up with a laser, enabling the researchers to see if colliding waves in the fin did indeed squirt out water.
To move laterally, the knifefish pivots the pectoral fins on either side of its body that channel how water flows over it to roll the fish around. All in all, "these simple motions enable it to move with great agility," MacIver told TechNewsDaily.
Get the world’s most fascinating discoveries delivered straight to your inbox.
Besides helping scientists understand the graceful motions of many aquatic creatures, these findings will help MacIver and his colleagues develop better underwater robots.
"One thing lacking in the field is an underwater robot with high maneuverability," MacIver said. "After the BP oil spill disaster, a remotely operated vehicle banged into the oil well head, and the reason for that is that current technology is about as easy to steer as a submerged bathtub. What are really needed for these operations are underwater vehicles that can move with the agility of underwater animals."
MacIver noted the robots they are developing copy the knifefish's sensory system as well.
"Most underwater robots use light and cameras for sensing, which can require kilowatts of energy to see something," he said. "The sensory system of our robot is very, very low power, just like the fish in the Amazon. Coupled with an extremely energy-efficient propulsion system, we hope to have a robot that requires very low energy and thus can go long distances for long [spans of] time."
MacIver, along with Oscar Curet and their colleagues, detailed their findings online Dec. 22 in the Journal of the Royal Society Interface.
