
 Live Science Plus
Live Science Plus





Intrepid baby-faced robot dons a jetpack for its next adventure — becoming the first humanoid robot to fly
New footage shows an expressionless iRonCub MK3 robot taking off using four thrusters — two where its arms should be and two in a jetpack on its back.

Researchers have demonstrated the first successful vertical liftoff of a humanoid robot — a major step toward flying robots that mimic human capabilities.
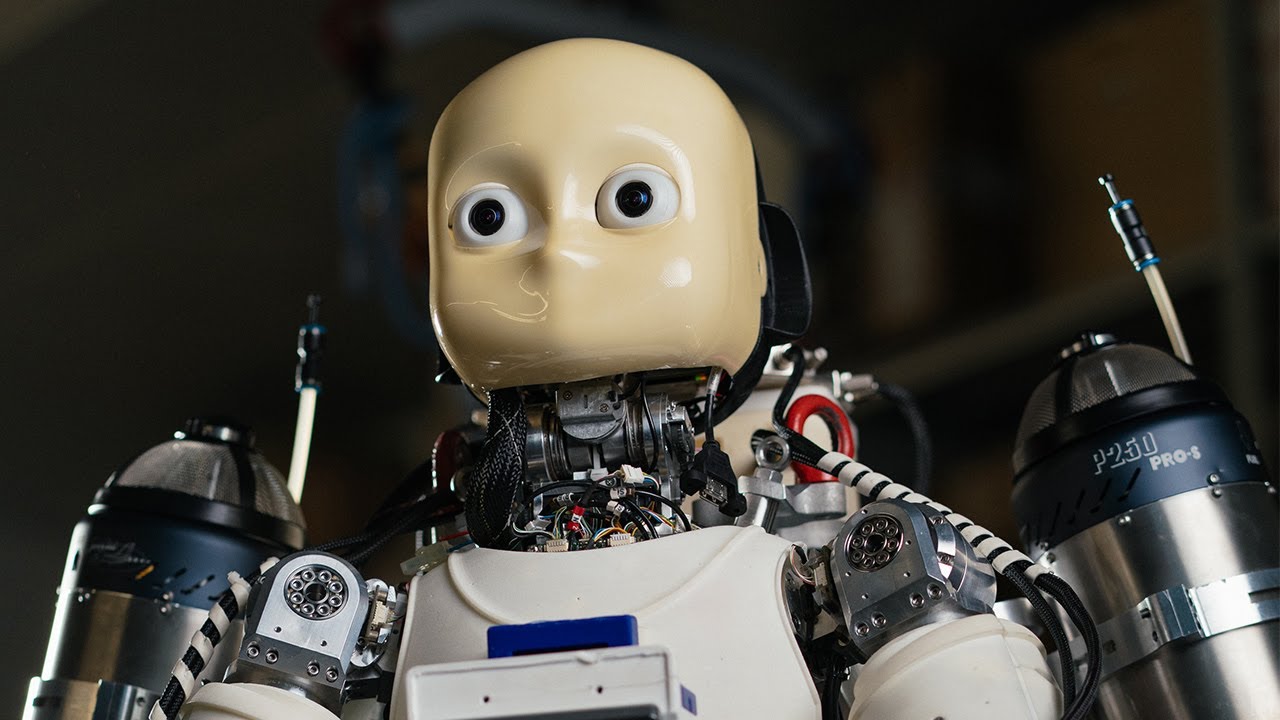
The new robot, dubbed iRonCub MK3, uses four thrusters to achieve vertical thrust, two built into its arms and two in a jetpack mounted on its back.
In footage released by the Italian Institute of Technology (IIT) to YouTube on 18 June, the mask-donning robot is held from a suspender and then activates, lifting off roughly 20 inches (50 centimeters) from the ground using its thrusters.
The iCub robot that IIT's humanoid is based on is child-like in both size and appearance. It measures 3 feet (1 meter) tall while weighing 49 pounds (22 kilograms), adopting child-like dimensions, and donning a highly recognizable smooth and shiny "baby face" head.
First launched in 2009 by the RobotCub Consortium of European universities, it is designed to be a testbed for research into human cognition and artificial intelligence (AI) and has been used in countless projects over the last 16 years.
In a corresponding study describing the robot, published June 1 on the arXiv preprint server, the IIT engineers say their augmented version of the robot is the first such jet-powered flying humanoid robot designed to take off. They added this work highlights the new possibilities that a flying, humanoid robot presents.
Related: Robots: Facts about machines that can walk, talk or do tasks that humans can't (or won't)
Get the world’s most fascinating discoveries delivered straight to your inbox.
In contrast to many other robotic platforms currently in development, which typically focus exclusively on ground-based locomotion and manipulation, adding aerial mobility may pave the way for assistance in search and rescue missions, traversing collapsed buildings and flooded areas, or other terrain inaccessible to humans, the scientists said in the study.
Combining flight with the ability to interact with its environment, a robot of this kind could clear debris and assist in locating or even extracting victims.
The authors of the study also point out that a flying humanoid robot could carry out repairs on structures difficult for human beings to access, like the undersides of bridges. They could even be deployed in hazardous environments where people can't safely operate, like the site of a nuclear or chemical leaks.
The world's first jetpack-powered flying robot
iRonCub is based on IIT's iCub3 platform. This system is designed to allow a robot to emulate a number of human capabilities as it's being remotely controlled by an operator wearing a virtual reality (VR) helmet-like heads-up display (HUD) and other specialized equipment.
To equip the iCub for flight, the team added load-bearing mounting brackets to secure the jetpack and a new titanium spine to support its weight. Because previous versions of the iRonCub had issues with catching fire from the thrusters' exhaust, heat-resistant panels and covers were added to the iCub chassis. The thrusters' tilt angle was also adjusted to help with in-flight stability and to angle the exhaust away from the robot's body.

To equip the iCub for flight, the team added load-bearing mounting brackets to secure the jetpack and a new titanium spine to support its weight.
For this version, the robot's forearms and hands were removed to make space for the arm-mounted thrusters, but the team says the forearms are still fully compatible and will be readded in later iterations.
To ensure the chassis could handle the stress of takeoff and flight, the team performed a Finite Element Method (FEM) analysis — a problem-solving technique that centers around breaking a structure down into smaller interconnected components. As a result, they applied axial loads of 750 newtons (three times the peak thrust of each turbine) to the brackets of the jet engines.
One of the major challenges of achieving flight in a humanoid robot of this type is accounting for all of the joints and actuation points and adjusting them, as well as the thrusters, in a coordinated way, so the robot doesn't end up flying off course or upside down.
The engineers managed this with what's called a Linear Parameter Varying Model Predictive Control (MPC), a complex flight controller that's constantly computing the optimal joint position and jet throttle.
RELATED STORIES
The scientists extensively tested the system first in computer simulations before then launching real-world tests, in large part due to the safety risks of operating thrusters with exhaust temperatures in excess of 1,112 degrees Fahrenheit (600 degrees Celsius).
After successfully demonstrating a launch with a predefined trajectory and accurate tracking, the team now plans to focus its efforts on improving the flight controller to handle external disturbances that may occur during a real flight scenario, like wind or other inclement weather.

Alan is a freelance tech and entertainment journalist who specializes in computers, laptops, and video games. He's previously written for sites like PC Gamer, GamesRadar, and Rolling Stone. If you need advice on tech, or help finding the best tech deals, Alan is your man.
You must confirm your public display name before commenting
Please logout and then login again, you will then be prompted to enter your display name.