







How DARPA's Robotics Challenge Works (Infographic)
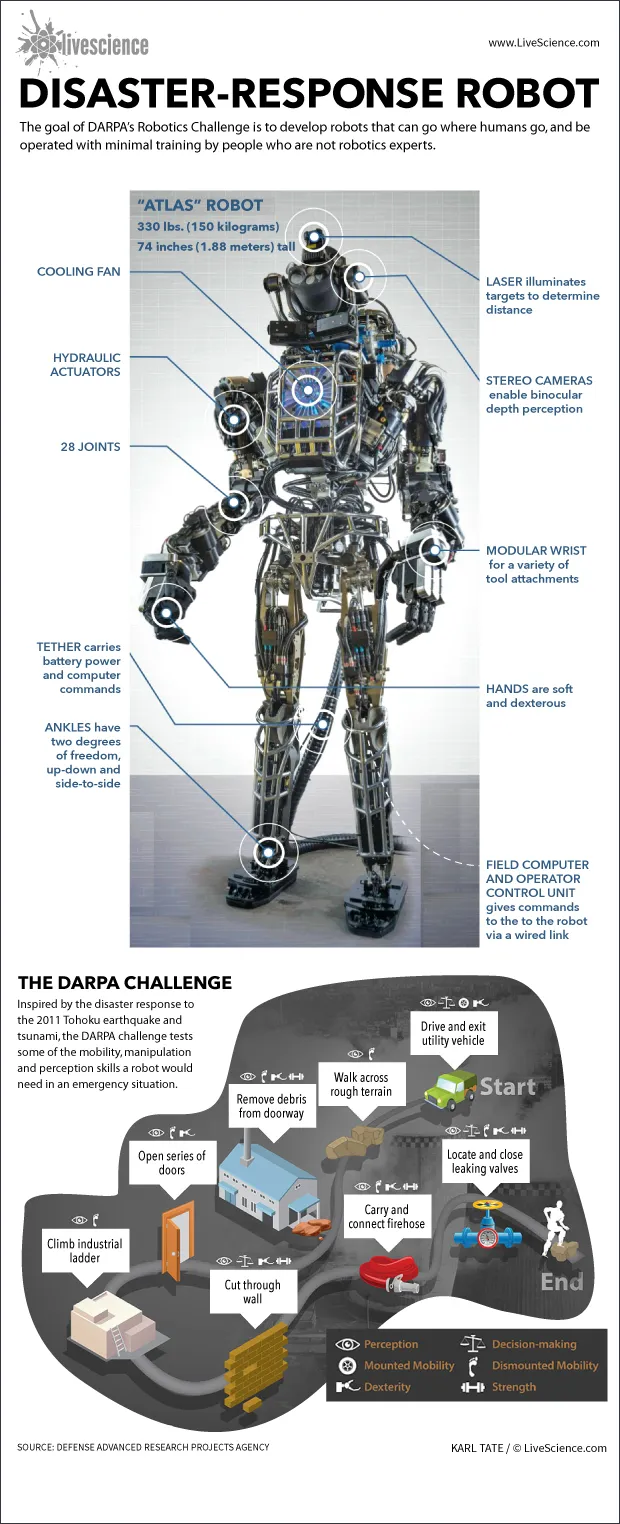
The Challenge is a series of tasks to test the capabilities of robots designed for disaster response in emergencies.
(Image credit: by Karl Tate, Infographics Artist)
Inspired by the disaster response to the 2011 Tohoku earthquake and tsunami, the DARPA challenge tests some of the mobility, manipulation and perception skills a robot would need in an emergency situation.
First, robots must drive and exit a utility vehicle. Then they walk across rough terrain and remove debris from a doorway. The robots open a series of doors, climb an industrial ladder and cut through a wall. Then they carry and connect a firehose. Lastly, the robot must locate and close leaking valves.

TOPICS
