A new robotic tool could help rescue workers locate victims of disasters and other emergencies before venturing into collapsed buildings or other potentially dangerous places.
Developed by researchers at the University of Guadalajara in Mexico, the new robotic system enables small, rugged bots — designed for search-and-rescue missions — to distinguish between human bodies and other objects, such as piles of rubble. The system includes an onboard computer and a stereoscopic camera that can capture 3D images.
As the robot roams around a disaster site, it snaps pictures of its surroundings with the 3D camera and then sends those images to the computer. The computer, in turn, scans the images for patterns that might indicate the presence of a human body, using a specially created algorithm, the researchers said in a statement. [Super-Intelligent Machines: 7 Robotic Futures]
Latest Videos From
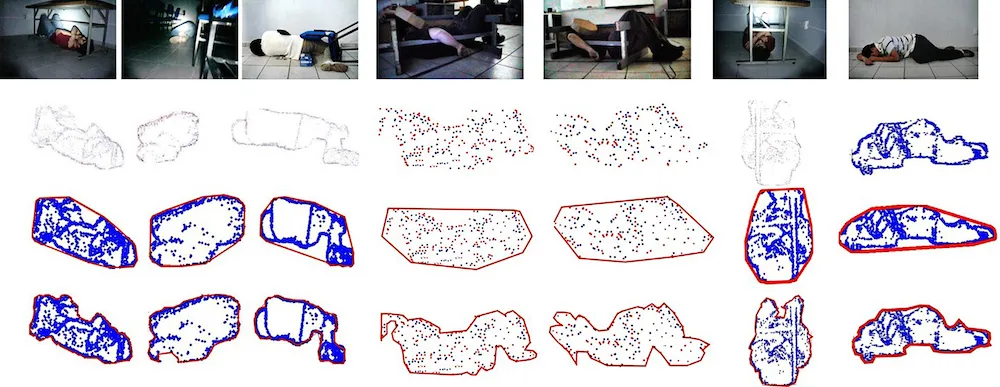
To distinguish between a human and a pile of bricks, the computer algorithm must first break down visual information into mathematical data. It does this using what's known as a descriptor system, which assigns numerical values to different parts of the 3D images. The numbers represent the different shapes, colors and densities of the objects in the picture.
All of this mathematical data is then merged together to create a second, much simpler, image. This image is passed through another algorithm, which detects whether the object that appears in the new image is a person or something else.
During tests, a robot was able to distinguish between a number of different human silhouettes, such as a person lying on his side or a person lying under a collapsed table. But the researchers are now working on getting the descriptor system to detect new silhouette patterns that could indicate the presence of human victims.
The goal is to get the robot to "think" for itself. In other words, the researchers want the robotic system to automatically detect new human shapes based on its previous experiences, in the same way that an intelligent being— like a person or a dog — might do so.
Currently, the researchers have the system installed on a robot, but they're now working on a new way to use an external computer to run the necessary algorithms. That way, a rescue worker on the outside of a collapsed building, for example, could send the robot inside to gather real-time information about people trapped inside.
Follow Elizabeth Palermo @techEpalermo. Follow Live Science @livescience, Facebook & Google+. Original article on Live Science.