A newly designed robot can sense and recover from unexpected damage, an ability that is sure to prove handy in dangerous terrain, researchers announced today.
Living organisms have the ability to continuously evaluate their abilities and surroundings and adjust their behavior accordingly. If a person twists an ankle, he walks differently so as to not put too much pressure on the injured muscles.
But robots aren’t typically equipped with such capabilities. They are programmed with a rigid model describing them and the surrounding environment. When they become damaged or something unexpected occurs, they are typically unable to adapt, limiting their potential.
Latest Videos From
Often when exploring new terrain, such as on another a planet, researchers cannot predict what a robot might encounter. So they designed a machine that can improvise in response to unexpected injuries.
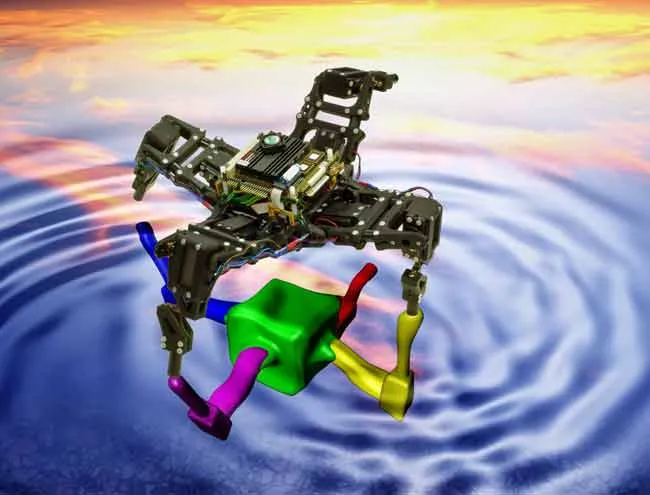
Referred to as Starfish, the new four-legged robot creates a model of itself and revises that model to respond and adapt to injury by synthesizing new behaviors.
"We never officially named it, but we usually refer to it as the Starfish robot, even though a real starfish has five rather than four legs," said lead study author Josh Bongard of the University of Vermont. "Also, a real starfish is much better than our robot at recovering from injury, because it can actually regrow its legs."
Starfish first walks around on a flat surface in order to observe its own motions using sensors. With the information it gathers, it’s able to create a virtual version of itself in an internal computer model [video].
Each time it moves, it updates this model and uses it to generate future motion. For example, when the researchers shortened one of its legs, the robot was able to shift its gait.
"Most robots have a fixed model laboriously designed by human engineers," said study co-author, Hod Lipson, a researcher from Cornell University. "We showed, for the first time, how the model can emerge within the robot. It makes robots adaptive at a new level, because they can be given a task without requiring a model. It opens the door to a new level of machine cognition and sheds light on the age-old question of machine consciousness, which is all about internal models."
This concept, the researchers hope, will help the development of more robust machines and could even aid in understanding animal and human behavior.
The study is detailed in the Nov. 17 issue of the journal Science.

 Live Science Plus
Live Science Plus